Hardware Guide
The Donington system uses the EchoMAV EchoPilot AI combined with a customized carrier board.
To fill in gaps not covered in this documentation, please cross reference the EchoPilot AI Documentation.
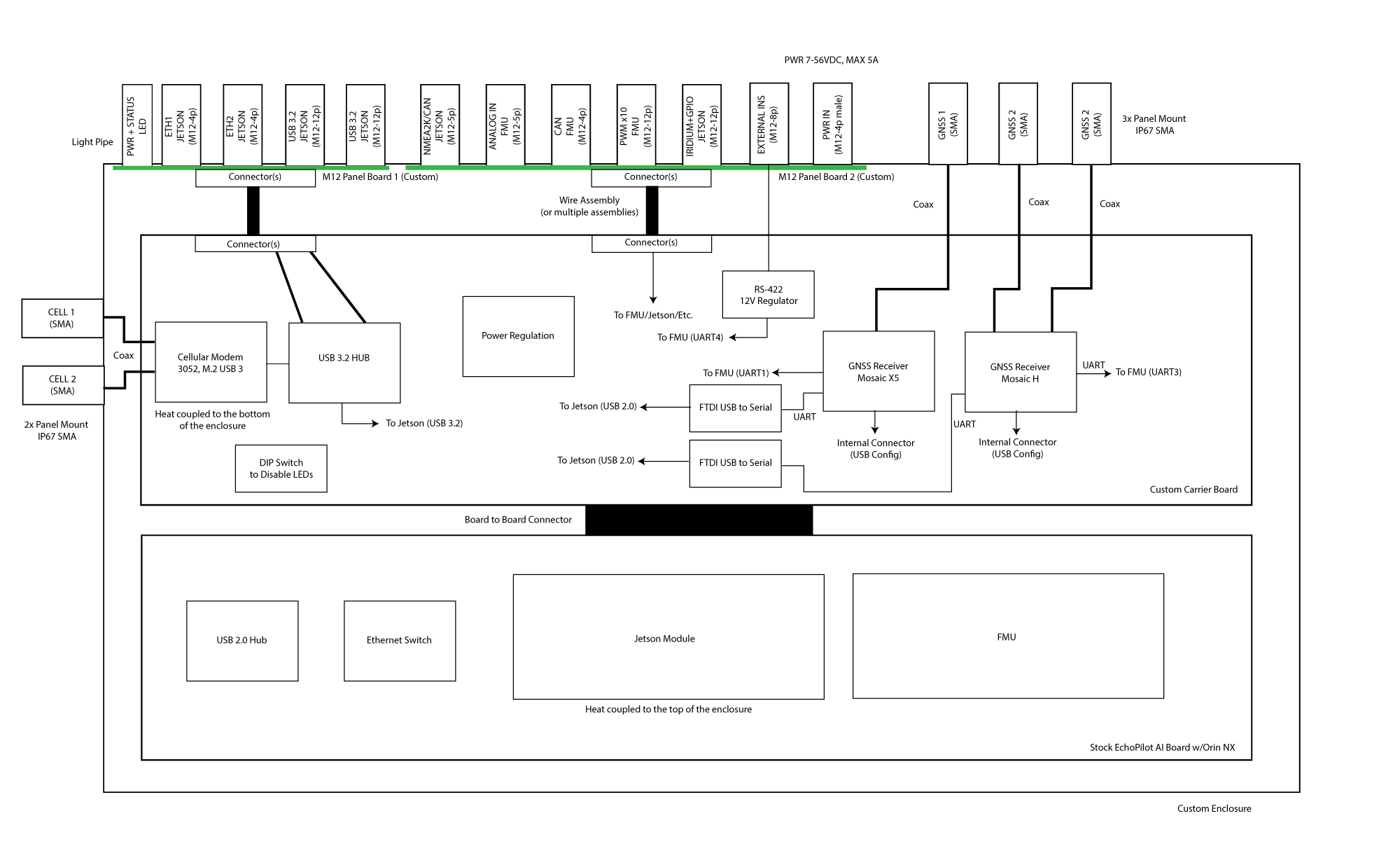
The flow chart below shows the overall hardware architecture. The custom carrier board described below mates to the EchoPilotAI's board to board connectors, and provided Donington-specific functionality. Specifically, the Donington carrier board provides two Septentrio GNSS units, a RS-422 level shifter for an external INS system, two FTDI serial converters, power subsystems and connectors not found on EchoMAV's standard commercial carrier board. The system also includes a ruggedize aluminum enclosure, passive heat dissipation, IP67-design, and industrial M12 connectors.
Carrier Board Schematic¶
The Donington Carrier Board Schematic is available to download.
FMU Ports¶
The Autopilot system (also referred to as Flight Management Unit (FMU)) is based on the open-hardware Pixhawk design running an STM32H743 microcontroller. The peripherals for this device are connected via I2C, SPI, CAN and UART ports. The table below identifies how each peripheral interfaces is used.
| Port | Use | Connector Assignement |
|---|---|---|
| USART1 | GPS1 | Mosaic X5 GPS (serial port 1, pins B1/D1) |
| USART2 | GPS2 | Mosaic H (serial port 1, pins B1/D1) |
| USART3 | Telemetry to Jetson (Telem2) | NA (internally routed) |
| UART4 | External INS1 (RS-422 shifted) | External INS connector |
| USART5 | Not Used | NA |
| USART6 | Remote ID | NA (internal) |
| UART7 | External/User (Debug) | EchoPilot J12 |
| UART8 | IO MCU | NA (internal) |
| SPI1 | ICM42688P IMU #1 and #2 | NA (internal) |
| SPI2 | RM3100 Compass and FRAM | NA (internal) |
| SPI3 | Not Used | NA |
| SPI4 | ICM42688P IMU #3 and MS5611 Baro #1 NA (internal) | |
| SPI5 | Not Used | NA |
| SPI6 | MS5611 Baro #2 | NA (internal) |
| I2C1 | External RGB LED | |
| I2C2 | Internal (Spare) | Carrier Board J13 |
| I2C3 | Not Used | NA |
| I2C4 | Not Used | NA |
FMU UART Order¶
The default UART order for use for autopilot firmware is provided below. The port name is important, as you will use this name within ArduPilot to set up parameters associated with each port. e.g. SERIAL1_PROTOCOL.
| Port Name | Function | Port | Connector |
|---|---|---|---|
| SERIAL0 | Console | USB | EchoPilot J7 |
| SERIAL1 | GPS1 | USART2 | None (to Mosaic H) |
| SERIAL2 | Telem2 | USART3 | None (internally routed to Jetson) |
| SERIAL3 | GPS2 | USART1 | None (to Mosaic X5) |
| SERIAL4 | External INS (RS-232 shifted) | UART4 | Carrier Board J32 |
| SERIAL5 | Onboard Remote ID | USART6 | NA |
| SERIAL6 | Debug | UART7 | EchoPilot J12 |
Please reference the EchoPilot AI's BSP firmware-specific board definition files for additional details related to board setup.
CAN¶
2 CAN ports from the autopilot (STM32H743) are exposed, one on the CAN connector, another on an internal (spare) connector (J14) on the carrier board. Please refer to ArduPilot CAN Bus Setup for information about DroneCAN setup.
1 CAN port from the Jetson is routed to the external NMEA2K connector.
Note
To enable CAN on the Jetson, modify /etc/modprobe.d/denylist-mttcan.conf and ensure the line blacklist mttcan is commented out. Reboot, then log in again and run sudo modprobe mttcan.
Termination¶
The two (2) CAN connections from the FMU (FMU CAN1 and FUM CAN2) and the one (1) from the Jetson are driven by LTC2875 transceivers and contain termination resistors at the drivers on the EchoPilot AI board inside the Donington enclosure. Should you desire to remove these termination resistors (e.g., you want to place the system in the middle of a CAN chain rather than at the end), refer to the following resistor locations:
| CAN | Resistor Label | Notes |
|---|---|---|
| FMU CAN1 | R19 | Near U4 and U45, size 0402 |
| FMU CAN2 | R9 | Near U3, size 0402 |
| JETSON CAN1 | R95 | Near U32, size 0402 |
Septentrio GNSS Units¶
The Donington system contains two Septentrio GNSS systems (X-5 and H). The table below summarizes the connections available to each.
| GNSS | Port | Connection |
|---|---|---|
| Mosaic X5 | COM 1 (B1/D1) | Autopilot SERIAL3 (115 kpbs) |
| Mosaic X5 | COM 2 (F1/H1) | Jetson via USB FTDI (e.g. /dev/ttyUSBx) |
| Mosaic X5 | USB | USB-C port inside enclosure |
| Mosaic H | COM 1 (B1/D1) | Autopilot SERIAL1 (115 kpbs) |
| Mosaic H | COM 2 (F1/H1) | Jetson via USB FTDI (e.g. /dev/ttyUSBx) |
| Mosaic H | USB | USB-C port inside enclosure |
Please refer to the schematic for more information.
Analog Inputs¶
The maximum voltage allowed on ADC1, ADC2, ADC3 and ADC4 is 15VDC. Voltage applied to this pin is scaled by 0.217, such that a maximum of 15V applied to these pins presents at ~3.3V maximum to the ADC. Each ADC input is ESD protected and buffered with a MCP6002 buffer. See the carrier board schematic for more information. The ADC mapping is shown below.
| ADC Input | STM32 Pin | Ardupilot GPIO Number |
|---|---|---|
| ADC1 | PA1 | 17 |
| ADC2 | PA2 | 14 |
| ADC3 | PA3 | 15 |
| ADC4 | PC4 | 4 |
NMEA2K¶
NMEA2K (standardized as IEC 61162-3,) is a plug-and-play communications standard used for connecting marine sensors and display units within ships and boats. Communication runs at 250 kilobits-per-second and allows any sensor to talk to any display unit or other device compatible with NMEA 2000 protocols.
The NMEA2K connector provided on the Donington system uses the Micro C (Female) connector standard.
The 12V output on the NMEA2K connector is limited to 2A.
Iridium¶
The Iridium connector uses several GPIO pins which are mapped back to the Jetson. The 5V output provided on this connector is limited to 500mA.
| Pin | Jetson Pin | Voltage | Function |
|---|---|---|---|
| 5V | NA | 5.0V, 500mA | Power Out from module |
| Irid TX | UART0_TXD (SOM 99) | 3.3V | UART TX from Jetson |
| Irid RX | UART0_RXD (SOM 101) | 3.3V | UART RX to Jetson |
| Irid NA | NA | NA | Network Available (reserved, not currently used) |
| Irid Ring | GPIO12 (SOM 218) | 3.3V | Iridium Ring signal |
| Irid On | NA | NA | Iridium modem control (reserved, not current used) |
| GPIO1 | I2S0_FS (SOM 197) | 3.3V | Spare GPIO for user applications |
| nMOD_SLP | nMOD_SLEEP (SOM 178) | 3.3V | Low Power/ Sleep Mode input |
| SLEEP/WAK | SLEEP/WAKE (SOM 240) | 3.3V | Control Jetson Power State |
| GND | NA | GND | Ground |
INS¶
The INS is designed to be used with a VectorNAV external INS system. The INS signals are driven by a LTC2863IDD RS422 transceiver, connected to UART4 (SERIAL4) of the autopilot. The +12V output on this connector is current limited to 375mA.
PWM Outputs¶
The Pulse Width Modulated (PWM) outputs are at 3.3VDC. They update every 2.5ms and can be set from 800-2200uS pulse widths (e.g., via ArduPilot).
GNSS Antennas¶
The electrical specifications for the 3x GNSS antennas are found below:
DC bias: +5V
Equivalent DC series impedance at input: 2.5 Ohms typical, 3.0 Ohms max
Antenna current limit: 150mA
ANT_1 pre-amplification gain range: Single-antenna modules: 15-50 dB (AGC gain: 15-50dB), Dual-antenna modules: 15-35dB (AGC gain: 30-50dB)
ANT_1 receiver noise:8.5 dB with 15 dB net pre-amplification, 18 dB with 25 dB net pre-amplification, 26 dB with 35 dB net pre-amplification, 35 dB with 45 dB net pre-amplification
RF nominal input impedance: 50 Ohms
VSWR: < 2:1 in all the supported bands