Software Configuration¶
Default Installed Jetson Software¶
From the factory, the autopilot system of each Donington system is provisioned with ArduRover(Boat) (latest stable release), and the Jetson is flashed with Jetson L4T 35.4.1 (or later). Minimal open-source software is installed on the Jetson module as described below.
-
Cockpit
Cockpit provides a web-based user interface which allows the user remote access into the system using any web browser. The access the system, from a host computer on the same network, browse to
https://IP_ADDRESSwhere IP_ADDRESS is the IP Address of the Donington system (see system label). Once logged into the web UI, there are many features including service monitoring, system settings and a web-based terminal. -
Mavlink-router
Mavlink-router is an open source tool used to receive telemetry from the autopilot via a serial port and stream it to an IP endpoint (10.223.1.10:14550 over UDP by default). This software is open source and you are free to review the installation scripts or reinstall/remove the software.
Default telemetry will stream to
10.223.1.10:14550using UDP (client mode). This will allow automatic connection to common Ground Control Stations including QGroundControl and Mission Planner. For this to work, your host computer must be set to10.223.1.10and the EchoPilot AI must have a network connection between one of the Ethernet ports and the host computer. Once you get this basic telemetry set up working, then we suggest moving to your final desired telemetry configuration.The Cockpit web application has been set up to allow basic configuration changes to Mavlink-router including connection mode, endpoint IP and Port and the input serial port connected to the autopilot system. While we believe this will be sufficient for the majority of applications, Mavlink-router can be configured with much more complicated scenarios, in which case we recommend NOT using the webUI and rather editing
etc\mavlink-router\main.confdirectly.
Default Autopilot Software and Configuration¶
By default, the Donington system will come from the factory with ArduRover(Boat) installed and bench tested. The following important ArduPilot parameters are set to ensure connectivity to the Jetson and proper use of the Septentrio GNSS systems:
| ArduPilot Parameter | Value | Description |
|---|---|---|
| SERIAL2_PROTOCOL | MAVLink2 | The telemetry connection between the FMU and Jetson |
| SERIAL2_BAUD | 500 | 500,000 bps baud rate |
| GPS_AUTO_CONFIG | 0 (Disabled) | Disables GPS Auto Configuration |
| GPS_TYPE | 10 (SBF) | Sets GPS 1 type to SBF |
| GPS_TYPE2 | 10 (SBF) | Sets GPS 2 type to SBF |
| SERIAL1_PROTOCOL | 5 (GPS) | Sets serial port 1 to use as GPS |
| SERIAL1_BAUD | 115 (115,200) | Sets serial port 1 baud rate to 115,200 |
| SERIAL3_PROTOCOL | 5 (GPS) | Sets serial port 3 to use as GPS |
| SERIAL3_BAUD | 115 (115,200) | Sets serial port 3 baud rate to 115,200 |
The hardware is compatible with other variants of ArduPilot (e.g. Plane, Sub, etc.) as well as the PX4 autopilot project. Instructions for how to flash other versions of firmware can be found at the links below:
If you flash PX4, the following parameters would need to be set to ensure connectivity to the Jetson:
MAV_1_CONFIG 102: Telem 2 ## Reboot after this change to expose additional parameters
MAV_1_RATE: 0
MAV_1_MODE 2: Onboard
SER_TEL2_BAUD: 500000 ## Reboot after this change
## other parameters will be needed for proper GNSS configuration. Please contact EchoMAV if you plan to use the Donington system with PX4 firmware.
Telemetry data between the Autopilot and the Jetson¶
The autopilot has a high-speed serial interface between the FMU/STM32H7 and the Jetson SOM. The Jetson UART1 (pins 203, 205) is connected to the autopilot's USART3 (SERIAL2).
On the Jetson side, UART1 is typically enumerated as /dev/ttyTHS0, although it could vary with different Jetson modules including /dev/ttyTHS1 and /dev/ttyTHS2.
For using the EchoPilot AI to route MAVLink data over a network, we pre-install and recommend MAVLink Router. By default, mavlink-router is configured to push telemetry via UDP to 10.223.1.10:14550
Should you need or want to install this independently, EchoMAV has an open-source installer which makes it easy to install MAVLink Router and configure it as a service which starts at boot. Please refer to the our installer repo https://github.com/EchoMAV/mavlink-router for instructions.
If you use the install repo above, please refer to the instructions there for configuration of the UART and destination IP address. Specifically edit etc\mavlink-router\main.conf with the appropriate settings.
Warning
If you manually configure mavlink-router by modifying etc\mavlink-router\main.conf, the default web user interface may show incorrect data related to telemetry settings, or may overwrite your desired settings if saved from the web-UI. If you are working with this file, you may choose to edit the cockpit files which control telemetry settings to match your needs, or remove this feature from the web UI completely. Please see associated files https://github.com/EchoMAV/echopilot_deploy/tree/master/ui/general.
If you have permission issues accessing /dev/ttyTHSX on the Jetson, please disable nvgetty and ensure you are a member of the dialout group as shown below.
Note
Reboot to apply changes.
Access the telemetry stream with your own application¶
If you wish to develop your own application to parse the vehicle's telemetry, you can disable mavlink-router using:
At this point, you can install your own application, which opens/dev/ttyTHS0 (on most Jetson systems) at 500,000 kbps and uses a mavlink parser library to parse the byte stream.
Additional information related to Septentrio GNSS¶
The Septentrio X5 and H units must be configured to output an SBF stream on COM1 before they will work with ArduPilot. The instructions to do so are below:
Warning
It is recommended to apply the ArduPilot parameters defined above BEFORE configuring the Septentrio GNSS systems.
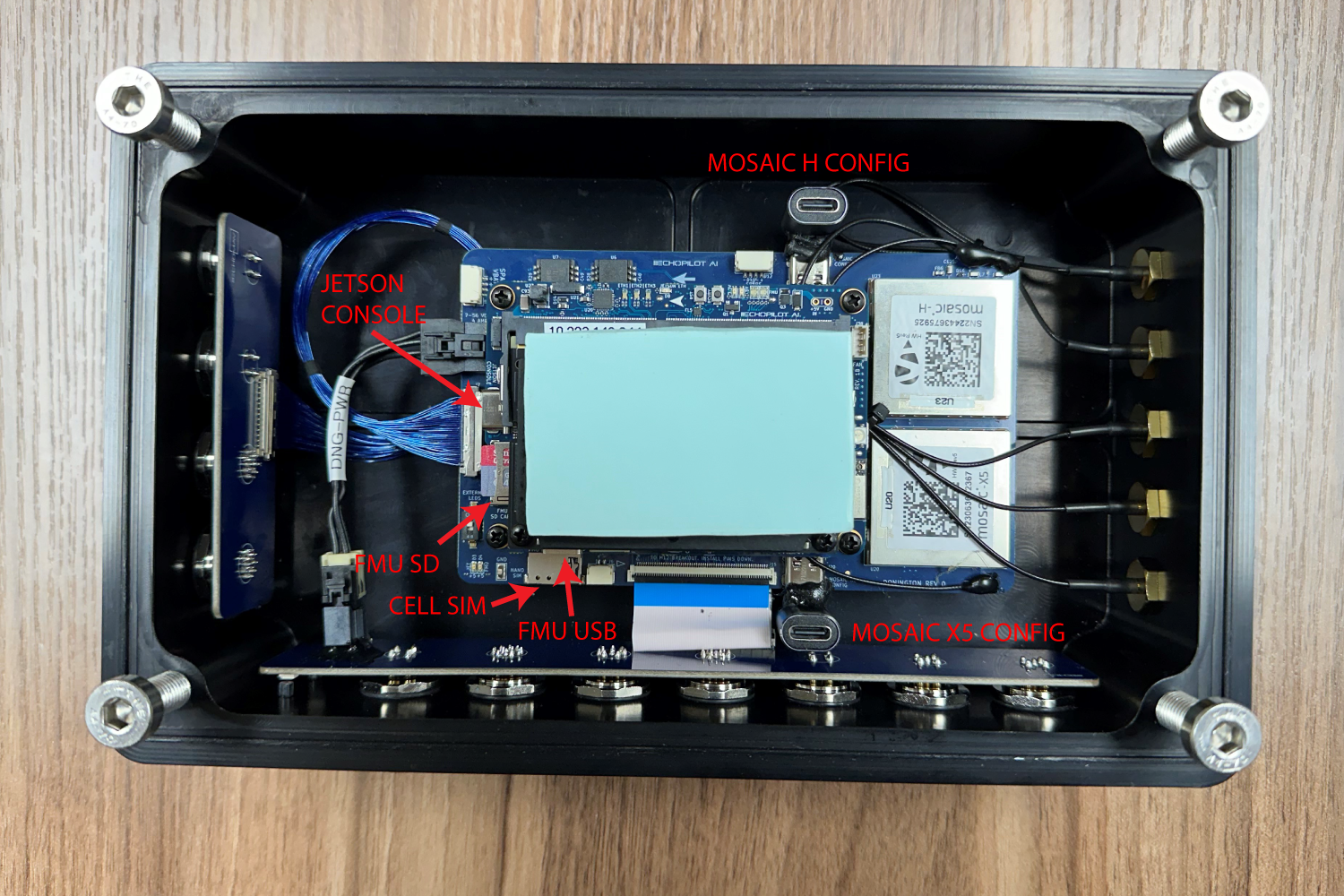
- Apply power to the Donington system, open the lid, and connect to the USB configuration port for the GNSS port you wish to configure (either the X-5 or the H).
- Many USB devices will enumerate, including one which should be a RNDIS network interface.
Note
On Windows, you will need to install the driver before the RNDIS network device will function. The installer is located in the driver folder which will be available in the mass storage device which will enumerate in the step above. On Linux (tested with Ubuntu 22.04 LTS) no drivers need to be installed.
- Open a web browser at 192.168.3.1 to access the Septentrio configuration UI.
- Go to the NMEA/SBF Out tab
- Select +New SBF Stream > Serial Port > COM1
- Set interval to 100ms.
- Check PVTGeod, PVTExtra and Status categories
- Select Finish > OK
- Navigate to the Admin tab > Configurations
- Under Copy Configuration File set the Source: Current and Target: Boot and press OK. This will save the current configuration so it is applied again at the next boot.
Optionally (but recommend while you are configuring the units anyway) you may enable an NMEA output on COM2, which would be used by future applications running on the Jetson and need access to the GNSS data. Enable NMEA GLL and GSA messages at an output rate of 1 Hz for both the X-5 and the H GNSS units.
Important
To ensure the settings were applied, we recommend power cycling, then reconnecting to the GNSS unit via USB and the web browser, navigate to NMEA/SBF Out tab and ensure the output you set up in the previous steps has persisted across a power cycle.
Using the Septentrio H for both GNSS position and heading.¶
The Septentrio Mosaic H is capable of calculating static heading if two antennas are used in the appropriate way. Please refer to the Mosaic-H manual for more innformation. To enable heading on the Mosaic H, you need to ensure that the AttEuler and AttCovEuler SBF messages are configured (see instructios above for setting up a SBF stream). Then the following parameters should be configured in ArduPilot:
| ArduPilot Parameter | Value | Description |
|---|---|---|
| AHRS_EKF_TYPE | 3 | Enable use for EKF3 |
| EKF2_ENABLE | 0 | Disable EKF2 |
| EKF3_ENABLE | 1 | Enable EKF3 |
| EKF_MAG_CAL | 2 (for ArduRover) | Can be left at default value |
| EK3_SRC1_YAW | 2 or 3 | Set to 2 if using GPS Heading only, or 3 if a compass(es) is also in the system |
| GPS_TYPE | 26 (SBF-Heading) | Sets the GPS type to include heading |
| GPS_MB1_OFS_X | USER DEFINED | X position of the base (primary) GPS antenna in body frame from the position of the 2nd antenna |
| GPS_MB1_OFS_Y | USER DEFINED | Y position of the base (primary) GPS antenna in body frame from the position of the 2nd antenna. |
| GPS_MB1_OFS_Z | USER DEFINED | Z position of the base (primary) GPS antenna in body frame from the position of the 2nd antenna |
Please find information here for additional info about configuring Septentrio devices with ArduPilot. For additional information about the GPS_MB1_XXX_X parameters, please refer here.
Unique Board Identifier¶
Each EchoPilot AI includes an AT24CS01-STUM unique ID EEPROM attached to the Jetson I2C 1 port at address 0x58. This can be used to obtain a unique 128-bit identifier (serial number) for your board.
Below is an example python script you can use to read this serial number.
First install python3 wih smbus
Create a new fileserial.py with these contents:
import smbus
import sys
# usage, pass the i2c bus as the first argument, e.g. python3 serial_number 0
i2c_ch = int(sys.argv[1])
# address on the I2C bus
i2c_address = 0x58
# Register address
serial_num = 0x80
# Read serial number register
def read_serial():
# Read the serial register, a 16 byte block
val = bus.read_i2c_block_data(i2c_address, serial_num, 16)
return val
# Initialize I2C (SMBus)
bus = smbus.SMBus(i2c_ch)
try:
# Print out the serial number
print(bytes(read_serial()).hex())
except:
pass